









Gion Kunz
Let's create together.
Simplification on uniform image
= Mean value of image
= Standard deviation of image
DSNU
Hot/Cold-Pixels
Sensor Glow
PRNU
Obstructions
Fixed-pattern noise can be removed completely by using proper calibration frames.
DSNU
Hot/Cold-Pixels
Sensor Glow
PRNU
Obstructions
Bias or Darkframe
Darkframe
Darkframe
Flatframe
Flatframe
After eliminating fixed-pattern noise, we're left only with random noise. We can reduce random noise by using statics to average it out. This is only a reduction and never an elimination.
10 Frames with DSNU and read noise
10 Frames simple average stack
After stacking 10 frames with FPN and random read noise, we can see the random noise disappear slowly.
Sensor
Photons
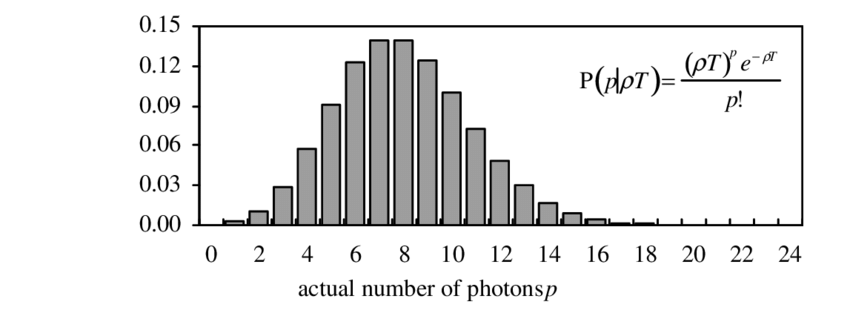
Photon shot noise or Poisson noise as a result of the statistical nature of light.
30s
30s
30s
30s
30s
2e-
3e-
2e-
1e-
3e-
Each sub-frame will contain a different amount of photons due to the statistical nature of light (Poisson distribution).
For expected 8 electrons
The amount of shot noise in photography is always the square root of the signal.
If You have 4 signal, your noise will be 2. That's 50% noise!
If You have 10000 signal, your noise will be 100. That's only 1% noise!
The light itself is not the problem but the inherent photon noise is!
10 Frames with DSNU and read noise
10 Frames simple average stack
After stacking 10 frames with FPN and random read noise, we can see the random noise disappear slowly.
= Sub-frame count
It's important to know what random noise sources you have and how large they are relative to each other.
Light-pollution
Read Noise
Dark current
= Dark current (e-/pixel/seconds)
= Sub-exposure length (seconds)
= Light pollution (e-/pixel/seconds)
= Read-noise (e-/pixel)
Light-pollution
Read Noise
Dark current
Total
By Gion Kunz
SAIG workshop about noise in digital imaging




